Prezentujemy Państwu stanowisko wyposażone w system wizyjny do kontroli poprawności montażu odlewów aluminiowych. Kontrola odbywa się za pomocą systemu wizyjnego Keyence przy współpracy z ramieniem robota ABB na stanowisku wyposażonym w stół obrotowy z 2 gniazdami (załadunek i rozładunek).
Cel projektu
Eliminacja reklamacji od klienta końcowego.
Problem klienta
- Duża ilość reklamacji od klientów końcowych
- Duża ilość elementów wymagających ponownego montażu na detalu;
Typ kontroli
- 2D, kamera na ramieniu robota
Szczegóły projektu
- Stacja wyposażona w dwupozycyjny stół obrotowy, aby zoptymalizować czas pracy operatora z maszyną.
- Możliwość załadunku/rozładunku na drugim gnieździe podczas trwania inspekcji na pierwszym gnieździe wewnątrz celi.
- Raportowanie z każdej sztuki do bazy danych oraz archiwizacja zdjęć w celu weryfikacji oraz unieknięcia nieuzasadnionej reklamacji.
- System wyposażony w procedurę Master Parts która wymusza cykliczne weryfikowanie inspekcji poprzez wzorce;
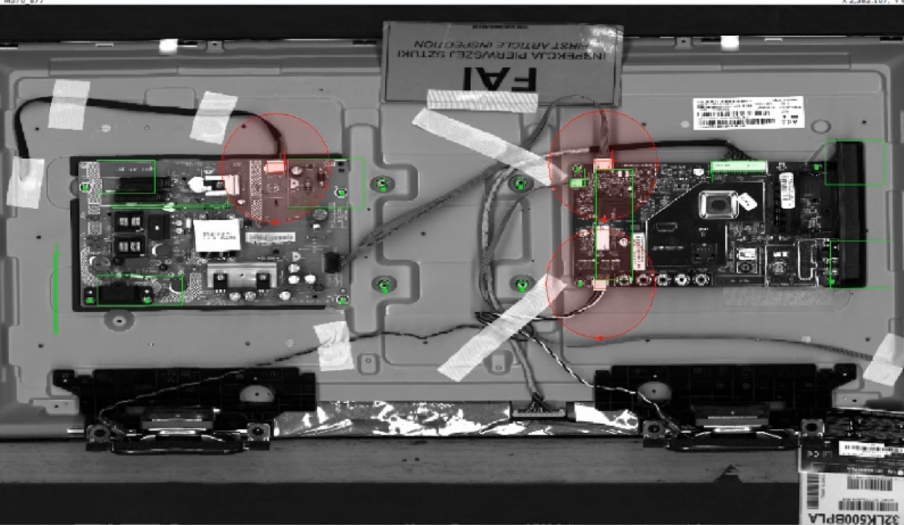
Aplikacja systemu wizyjnego na podstawie zebranego obrazu :
- Rozpoznaje obecnośc,rodzaj i kolor nitów ,
- Wykrywa obecność helicoli i niewybitego tanga,
- Sprawdza jakość montażu wkładki (czy nie zerwany ostatni gwint),
Główne wyzwania
- Słaba widoczność wady przeskoczonej helicoli na kolejny zwój gwintu. Wada występująca podczas automatycznego wybijania tanga
- Słaba widoczność wady w połączeniu z dużą ilością zabrudzeń produkcyjnych – olej i wióry aluminiowe, czasami ślady po ręcznym montażu komponentów
Rozwiązanie Hardware:
- Sterownik: Keyence XGX-2200
- Kamera: CA-HX200M
- Optyka typu macro: Optoengineering
- Robot: ABB
Zakres projektu:
- Przygotowanie stanowiska demo przed zakupem celem potwierdzenia założeń projektu,
- Zaprojektowanie stanowiska Systemu Wizyjnego uwzględniając montaż bez ingerencji w obecną infrastrukturę linii,
- Opracowanie interfejsu użytkownika wyposażonego w moduł intuicyjnego dodawania i edycji referencji;
- Dostawa i integracja
- Montaż, uruchomienie, testy i walidacja systemu,
- Szkolenie personelu,
- Przygotowanie dokumentacji systemu,
- Zdalne wsparcie techniczne dla użytkownika.
Stół obrotowy stanowiska kontroli wizyjnej.
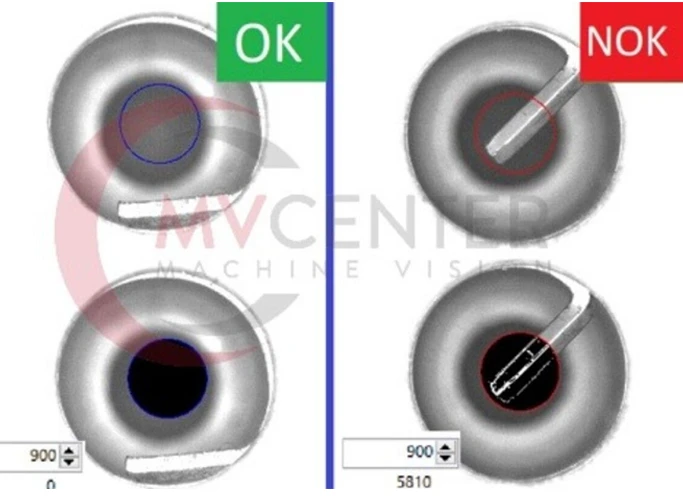
Kontrola wkładki gwintowej – wybicie końcówki, przeciągnięty zwój gwintu.
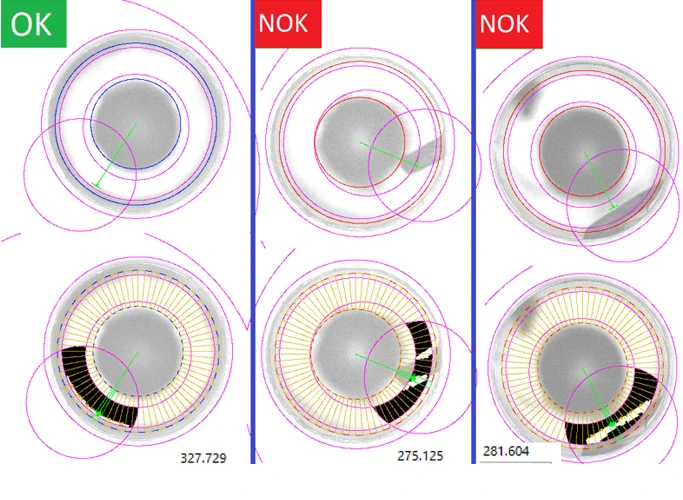
Analiza obrazu i algorytm kontroli wkładki gwintowej – wybicie końcówki, przeciągnięty zwój gwintu.
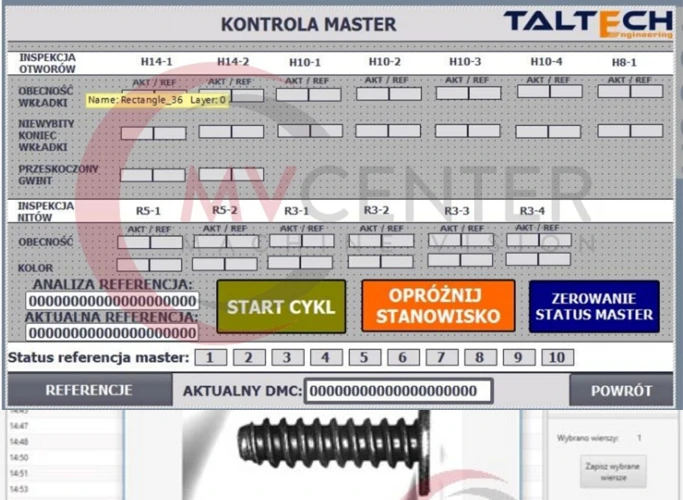
Ekran kontroli Poka Yoke (Master Parts) – autochallenge poprawności działania systemu
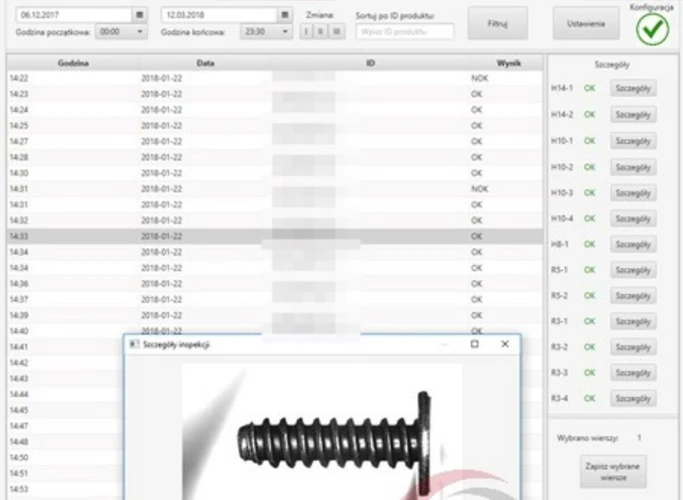
Aplikacja do przeglądania danych z inspekcji oraz analizy raportów z przeprowadzonej kontroli.
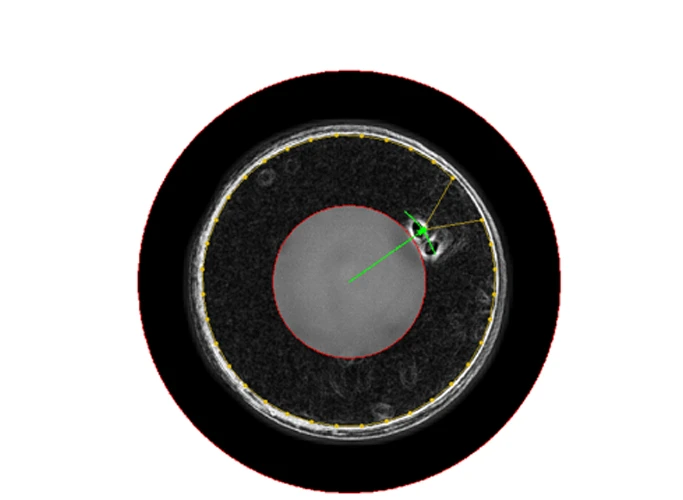
Wykryty defekt wkładki gwintowej.
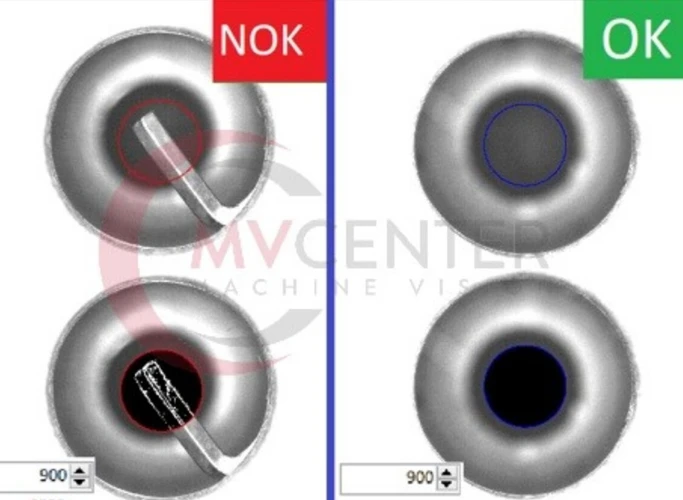
Przykłady detekcji NOK.
Detale projektowe
| Cena systemu wizyjnego (Budżet projektu) | 85 000 EURO |
| Realizacja projektu: | 2017 rok |
| Planowany ROI: | 18 m-cy (1,5 roku) |
Na budżet projektu wpływa wiele zmiennych, stąd jeśli interesuje Cię podobne rozwiązanie, najlepiej skontaktuj się z nami ↓
Osoba prowadząca projekt:
Paweł Janczyk
pawel.janczyk@mv-center.cm
669 209 109